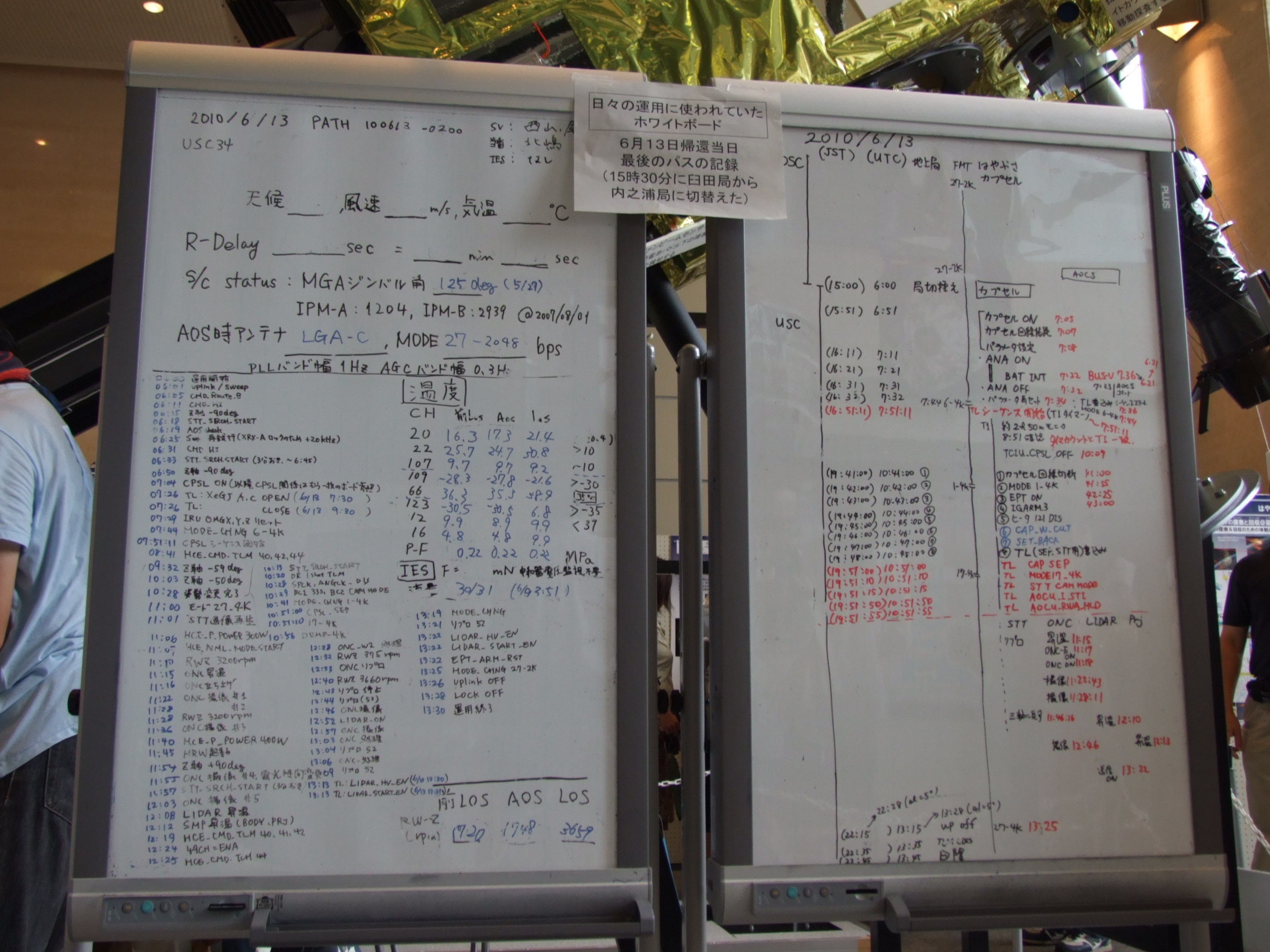
「はやぶさ」最後の日の運用ボード
 ←画像をクリックすると大きい画像になります。
←画像をクリックすると大きい画像になります。
-----[左ボード]-----
2010/6/13 PATH 100613 -0200 # 日付
USC34 # USC34(鹿児島の内之浦34mアンテナ)で通信を行う
SV: 西山, 尾? # スーパーバイザー(運用の現場監督)の名前
当番: 北嶋
IES: なし # IES(イオンエンジンシステム)は運用終了したので、担当はいない
天候 , 風速 m/s, 気温 ℃
~~~~~~ ~~~~~~ ~~~~~~
R-Delay sec = min sec # 通信遅延 ??? 秒 = ?? 分 ?? 秒 (「はやぶさ」に電波が届くまでの時間。地球近くなので 1 秒以下だが、イトカワ付近では 14 分以上かかってた)
~~~~~~ ~~~~~~ ~~~~~~
S/C status: MGA ジンバル角 125deg (5/27) # S/C(意味不明)の 状態: MGA(ミドルゲインアンテナ) ジンバル角 125 度 (MGA-A は上下に首振りできる。その角度のこと)
~~~~~~~
IPM-A: 1204, IPM-B: 2939 @2007/08/01 # IPM(IES ポインティング機構)はイオンエンジンを上下左右に首振りできる。数値は上下と左右それぞれの角度のことだろう(単位は不明)
AOS 時アンテナ LGA-C, MODE 27-2048 bps # AOS(可視開始(可視とは地上アンテナから「はやぶさ」が見える、つまり通信できる位置にあること))) 可視開始時アンテナは LGA(ローゲインアンテナ)-C, モード 27-2048bps (通信速度)
~~~~~ ~~~~~~~~
PLL バンド幅 1Hz AGC バンド幅 0.3Hz # 通信のパラメータ。PLL(フェイズロックループ)のバンド幅は 1Hz, AGC(オートゲインコントロール)のバンド幅は 0.3Hz (PLL とは、通信周波数に多少変化があっても追従する機能, AGC は信号の強さを補正する機能)
----------------------------------------------------------------------
JST UTC # JST: 日本標準時, UTC: 協定世界時
左15:00 06:00 運用開始
左15:01 06:01 uplink / sweep # 通信リンク(上り) / 通信確立のため周波数を掃波(少しずつ変化させること)する (この段階では通信可能な周波数は正確には分かっていない。一度周波数が合えば PLL によって自動追従する)
左15:05 06:05 CMD_Route_B # コマンド経路を B に(?)
左15:11 06:11 CMD_HI # 謎コマンド
左15:15 06:15 Z軸 -90deg # Z軸まわりの角度は(+Z(アンテナ面)から見て)-90度
左15:18 06:18 STT_SRCH_START # STT(スタートラッカー:星を撮影し自分の位置・姿勢を知るためのカメラ)による検索開始(地球を?)
左15:19 06:19 AOS check # 可視チェック(?)
左15:25 06:25 Sweep 再試行 (XRX-A ロックのため +20kHz) # Xバンド受信機 A の PLL に失敗したので、周波数を変えて掃波しなおし
左15:31 06:31 CMD HI # 謎コマンド
左15:33 06:33 STT_SRCH_START (3分おき. 〜6:45 (15:45 JST)) # スタートラッカーによる検索開始
左15:50 06:50 Z軸 -90deg # Z軸の角度は -90度
左16:04 07:04 CPSL ON (以降, CPSL 関係はもう一枚のボード参照)
右15:51 06:51 カプセル ON 7:05 #(右ボード)
右 カプセル回線接続 7:07 #(右ボード)
右 パラメータ設定 7:08 #(右ボード)
右16:11 07:11 ・ANA ON #(右ボード) 謎コマンド
右16:21 07:21 || BAT INT 7:22 BUS-V 7.36→6.21→6.31 #(右ボード) バッテリーへの指示(?)
左16:26 07:26 TL: XeGJ A, C OPEN (6/13 7:30 (16:30 JST)) # イオンエンジン A と C の XeGJ(キセノンガスジェット) を 7:30 に開け (+Z面から見て時計周りの回転トルクを生じる)
左16:26 07:26 TL: CLOSE (6/13 9:30 (18:30 JST)) # 同 9:30 に閉じろ
左16:29 07:29 IRU OMG X, Y, Z リセット # IRU(インターナル リファレンス ユニット)と OMG(ジャイロ??) の X, Y, Z 軸をリセット (角度センサのことだろう)
右16:31 07:31 ・ANA OFF 7:32 7:23 AOCS コマンド #(右ボード) ANA は不明。AOCS は姿勢軌道制御システム
右16:32 07:32 ・パラメータ角セット 7:34 ・TL書き込み シーケンススタート #(右ボード)
左16:44 07:44 MODE_CHNG 6-4K # テレメトリ切り替え
左16:51:11 07:51:11 CPSL シーケンス開始 # カプセル分離のシーケンス開始
右16:51:11 07:51:11 TL シーケンス開始(T1タイマー)〜7:51:11 #(右ボード)
右 T1 約2h50mモニタ #(右ボード)2時間50分モニタ
左17:41 08:41 HCE_CMD_TLM 40, 42, 44 # HCE(ヒータ制御装置) コマンド テレメータ 40, 42, 44 (??)
右17:51 08:51 確認 タイマカウントと TI 一致 #(右ボード)
左18:32 09:32 Z軸 -59deg # Z軸の角度は -59度
左19:03 10:03 Z軸 -50deg # Z軸の角度は -50度
左19:28 10:28 姿勢変更完了 # 姿勢変更完了
-----[ 挿入開始 ]-----
右19:09 10:09 TCIU_CPSL OFF #(右ボード)TCIU(テレメトリ/コマンドインターフェースユニット) カプセル OFF
左19:13 10:13 STT_SRCH_START # スタートラッカ検索開始
左19:20 10:20 DR 1 sho(e?)t TLM # DR(データレコーダ) 1 shot テレメトリ (?)
左19:28 10:28 SPCK(SPLK?), ANGCK_DLS # 不明 (角度チェック?)
左19:29 10:29 BC1 33s, BC2 CAM MODE # BC1 33 秒, BC2 カメラモード (BC 意味不明)
左19:41 10:41 MODE_CHNG 1-4K # テレメトリ切り替え
右19:41:00 10:41:00 (1)カプセル回線切断 #(右ボード)カプセル回線切断
右19:42:00 10:42:00 (2)MODE 1-4K #(右ボード)テレメトリ切り替え
右19:43:00 10:43:00 (3)EPT ON #(右ボード)EPT(衛星プログラムタイマ) ON
右19:44:00 10:44:00 (4)IGARM.3 #(右ボード)謎コマンド
右19:45:00 10:45:00 (5)ヒータ121 DIS #(右ボード)ヒータ121停止
右19:46:00 10:46:00 (6)CAP_W_CUT #(右ボード)へその緒切断
右19:47:00 10:47:00 (7)SET_BACK #(右ボード)謎コマンド
右19:48:00 10:48:00 (8)TL(SEP,STT用書き込み) #(右ボード)カプセル分離とスタートラッカ用のタイムラインコマンド群書き込み
左19:51:00 10:51:00 CPSL_SEP # カプセル分離
右19:51:00 10:51:00 TL CAP SEP #(右ボード)カプセル分離
左19:51:10 10:51:10 17-4K # テレメトリ切り替え
右19:51:00 10:51:00 TL MODE17_4K #(右ボード)カプセル分離
右19:51:15 10:51:15 TL STT CAM MODE #(右ボード)スタートラッカをカメラモードに (カプセル撮影に挑戦?)
右19:51:50 10:51:50 TL AOCU_I_STI #(右ボード)姿勢軌道制御ユニットに対するコマンド
右19:51:55 10:51:55 TL AOCU_RWA_HLD #(右ボード)同上。RWAをホールドせよ(?)
左19:56 10:56 DUMP-4K # ダンプ 4K (通信モード?)
-----[ 挿入終了 ]-----
左20:00 11:00 モード 27_4K # 通信モードの変更
左20:01 11:01 STT 画像再生 # スタートラッカ画像再生
左20:06 11:06 HCE_P_POWER 300W # ヒータ制御装置出力 300W
左20:07 11:07 HCE_NML_MODE_START # 同ノーマルモード開始
左20:10 11:10 RWZ 3200rpm # リアクションホイールZ 3200rpm
左20:15 11:15 ONC 昇温 # 地球撮像のため、冷えていた ONC-W2 広角カメラを温める
左20:16 11:16 ONC 立ち上げ # 同立ち上げ
左20:22 11:22 ONC 撮像 #1 # 地球撮像試行 1 回目
左20:28 11:28 #2 # 同 2 回目
左20:28 11:28 RWZ 3200rpm # リアクションホイールZ 3200rpm
左20:36 11:36 ONC 撮像 #3 # 地球撮像試行 3 回目
左20:40 11:40 HCE_P_POWER 400W # ヒータ制御装置出力 400W
左20:45 11:45 HRW 起動 # 不明
右20:46:16 11:46:16 (STT) 三軸に戻す # 三軸制御に戻す
左20:54 11:54 Z軸 +90deg # Z軸の角度は +90度
左20:55 11:55 ONC 撮像 #4, 露光時間変更 # 地球撮像試行 4 回目
左20:57 11:57 STT_SRCH_START (3分おき) # スタートラッカで検索開始
左21:03 12:03 ONC 撮像 #5 # 地球撮像試行 5 回目
左21:08 12:08 LIDAR 昇温 # レーザ高度計を温める
左21:12 12:12 SMP 昇温 (BODY, PRJ) # サンプラボディーと PRJ の温度上昇
左21:19 12:19 HCE_CMD_TLM 40, 41, 42 # ヒータ制御装置 コマンド テレメトリ 40, 41, 42 (??)
左21:24 12:24 49CH=ENA # 49CH を有効に(?)
左21:25 12:25 HCE_CMD_TLM 44 # ヒータ制御装置 コマンド テレメトリ 44 (??)
-----[ 改段 ]-----
左21:28 12:28 ONC_W2 処理 # ONC 撮像データを JPEG に(?)
左21:32 12:32 RWZ 375rpm # リアクションホイールZ 375rpm
左21:33 12:33 ONC リプロ # ONC 撮像データを再生(地上に転送)
左21:40 12:40 RWZ 3660rpm # リアクションホイールZ 3660rpm
左21:43 12:43 リプロ停止 # 撮像データを再生停止
左21:44 12:44 リプロ(52) # 再生(52) (撮像データだと思う)
左21:46 12:46 ONC 撮像#6 # 地球撮像試行 6 回目
左21:52 12:52 LIDAR_ON # レーザ高度計 ON
左21:57 12:57 ONC 撮像H7 # 地球撮像試行 7 回目
左22:03 13:03 ONC 処理 # 地球撮像試行 8 回目(これがあの「ラストショット」)
左22:04 13:04 リプロ 52 # 再生(52)
左22:06 13:06 ONC 処理 # 地球撮像試行 9 回目(転送はされなかったがメモリには残った筈の「真のラストショット」)
左22:09 13:09 リプロ 52 # 再生(52)
左22:13 13:13 TL: LIDAR_HV_EN (6/13 13:30 (22:30 JST)) # 13:30 にレーザ高度計 HV を有効にせよ(?)
左22:13 13:13 TL: LIDAR_START_EN (6/13 13:31 (22:31 JST)) # 13:31 にレーザ高度計送信 ON せよ
-----[ 改段 ]-----
左22:19 13:19 MODE_CHNG # テレメトリ切り替え
左22:21 13:21 リプロ 52 # 再生(52)
左22:22 13:22 LIDAR_HV_EN # レーザ高度計 HV を有効にせよ(?)
左22:22 13:22 LIDAR_START_EN # レーザ高度計送信 ON (TL が間に合わないので手打ちした)
左22:22 13:22 EPT_ARM_EN # 衛星プログラムタイマ ARM を有効に(?)
左22:25 13:25 MODE_CHNG 27-2K # テレメトリ切り替え
左22:26 13:26 uplink OFF # 通信リンク OFF
左22:28 13:28 LOCK OFF # PLL ロック OFF
左22:30 13:30 運用終了 # 運用終了
-----[ 改段 ]-----
[温度] # いろんなとこの温度データ(単位は℃) (CH は測定箇所: 例 122 = SMP BODY, 137= CAP PLT)
CH 前Los Aos Los # 前回可視終了時, 可視開始時, 可視終了時
20 16.3 17.3 21.4 (20.4) # 20.4 ℃が基準
22 25.7 24.7 30.8 > 10 # 10℃以上であること
107 9.7 9.7 9.2 〜10 # 10以下であること
~~~ ~~~~
109 -28.3 -27.8 -21.6 >-30 # -30℃以上であること
66 36.3 35.3 38.9 [35℃] # 35℃が基準
~~~ ~~~~
123 -30.5 -30.5 6.8 >-35 # 35℃以上であること
12 9.9 8.9 9.9 < 39 # 39℃以下であること
16 4.8 4.8 9.9
P-F 0.22 0.22 0.22 MPa # 単位はメガパスカル(圧力)
[IES] F = mN 中和器電圧監視不要 # イオンエンジン出力 (単位はミリニュートン)
流量 30/31 (6/9 3:51) # キセノンガスの流量(?)
---------------------------------
前LOS AOS LOS # 前回可視終了時, 可視開始時, 可視終了時
RW-Z 1720 1748 3659 # リアクションホイールZ 回転数
(rpm) ~~~~ ~~~~~ ~~~~
![]()